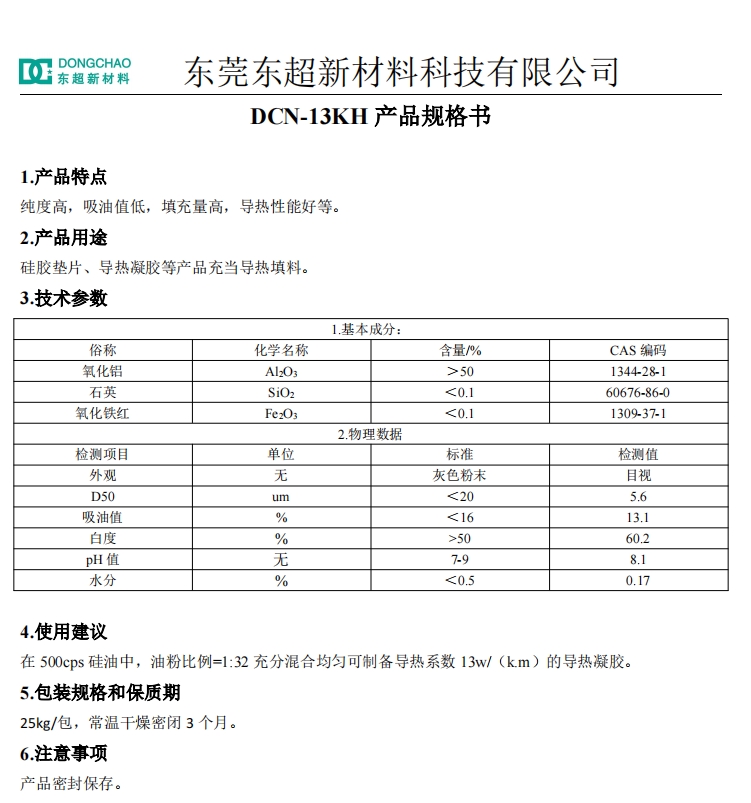
当人们谈论人形机器人时,目光往往聚焦于具身智能的算法突破、灵巧手的精密控制,或是双足行走的动态平衡。然而,在这些炫目技术的背后,一个更为基础却至关重要的工程难题正悄然浮现——散热。人形机器人是机电一体化的集大成者,它的“大脑”(AI芯片)、“关节”(伺服电机)、“皮肤”(传感器)都在持续产生热量,且必须在极度狭小的空间内完成热量的疏导。这不仅是工程挑战,更是导热材料的一片全新蓝海。关节电机的“隐秘热量”——被忽视的失效元凶 人形机器人的关节模组,是其运动的核心。为了在有限的空间内输出足够的扭矩,现代机器人关节通常采用高度集成化设计——将无框力矩电机、谐波减速器、高精度编码器、制动器甚至驱动电路全部集成在一个圆柱形壳体内。这种“机-电-控”一体化的设计,带来了一个致命问题:热量堆积。 电机运行时的铜损和铁损、减速器高速运转的摩擦热、驱动芯片的焦耳热,全部汇聚在这个密闭的“黑盒子”里。更棘手的是,机器人的关节往往在低转速、高扭矩工况下运行,这种工况下电机的发热量尤为惊人。当热量无法及时导出,温度持续攀升,一系列连锁反应便会发生: 首先,永磁体在高温下会发生不可逆的退磁。钕铁硼磁钢的剩磁随温度升高而下降,当温度超过其居里温度或长期工作在高温区,电机扭矩输出将永久性衰减,导致机器人动作无力、精度丧失。其次,谐波减速器内部的润滑脂在高温下会加速挥发、碳化,润滑失效导致柔轮磨损加剧,最终引发减速器卡死或精度崩溃。此外,编码器光栅或磁栅的热膨胀,会直接导致位置反馈失真,让机器人的运动控制陷入混乱。 热管理厂商正在积极布局机器人散热方案,而在其上游,导热材料的核心正是导热粉体。东超新材深刻理解机器人关节的特殊工况,推出了专为自动涂覆工艺设计的东超凝胶用导热粉。该系列粉体赋予导热凝胶优异的触变性——在静止时保持高粘度,确保涂覆在垂直或倾斜的关节内壁时不流淌、不垂挂;在受到螺杆泵或柱塞阀的剪切力时,粘度瞬间下降,展现出优异的流平性,能够轻松填满电机定子与壳体之间的微小间隙,实现完美的界面润湿。
更为关键的是,人形机器人的每一克重量都关乎动态性能。过重的“手臂”会导致末端惯量过大,增加电机负荷,降低响应速度。东超新材通过使用低比重的复配粉体技术,在保证导热系数的前提下,显著降低了导热材料的整体密度。这意味着,机器人工程师可以在不增加自重的前提下,为关节填充更厚的导热层,或者将节省下来的重量分配给电池或结构加强。这种“热”与“轻”的精妙平衡,是提升机器人动态响应能力和续航能力的关键。感知系统的信噪比守护——温度与纯净的双重考验 如果说关节是机器人的肌肉,那么遍布全身的传感器就是神经末梢。无论是用于力控的六维力传感器,还是用于环境感知的触觉皮肤,都对温度极其敏感。压电陶瓷材料在温度变化时,其压电系数会发生漂移,导致力觉反馈失真;电容式触觉传感器的介电层,其介电常数随温度波动,会使触控信号产生温漂。 因此,在传感器周围填充的导热材料,不仅要负责将芯片产生的热量带走,更要确保自身不对敏感信号产生干扰。导热粉体在这里扮演着双重角色:既要导热,又要“安静”。如果粉体中存在微量的磁性杂质(如铁、钴、镍或其氧化物),在变化的电磁场环境下,这些杂质会产生微弱的感应电流或磁噪声,耦合进传感器信号链路,淹没微弱的触觉或力觉信号,导致信噪比恶化。 东超新材深知“纯净”对于精密传感的价值。我们通过严格的原料筛选、全程工艺以及高纯度的生产过程控制,对导热粉体进行深度纯化处理。确保每一批出厂的粉体,其磁性物质含量被控制在极低水平,从源头上杜绝了磁性杂质对传感器信号的干扰。当东超的导热材料填充在机器人灵巧手的指尖传感器或手腕力控传感器周围时,它们默默地构建起一条纯净的热流通道,既带走了热量的干扰,又守护着每一个微弱信号的高保真传输。 在人形机器人即将叩开亿万家庭大门的前夜,东超新材正以创新的导热粉体技术,助力机器人突破散热与轻量化的双重瓶颈,让冰冷的机械拥有更持久的活力与更敏锐的感知。










 联系客服
联系客服
